Liebes Forum,
bei mir auf der Baustelle habe ich öfters das Problem dass ich genau wissen muss wie viel Material ich benötige, da bei mir am Grundstück kaum/keine Lagerflächen zur Verfügung stehen, bzw. damit ich nicht zu viel Material bestelle.
Die gleiche Methodik habe ich auch angewandt um beim Aushub zu überprüfen ob die verrechneten m³ stimmen (waren bei mir sehr teuer da Altlast...), bzw. wenn Material abgeschüttet wurde die m³ des Schütthaufen stimmen.
Ich teile hier mit euch gerne meinen Work-Flow wie sich mit einfachen Mitteln und ohne Kosten, ein Volumen am Bestand herausfinden lässt.
In diesem Beispiel werde ich anhand des Scans von meinem Arbeitsgraben ermitteln wie viel Rollschotter ich benötigen werde, um diesen zu verfüllen.
Nachdem die Baugrube nicht überall mit gleichem Winkel und unterschiedlich breitem Arbeitsgraben zum Haus errichtet wurde wäre eine Schätzung mit Maßband und händischer Berechnung zwar auch möglich - die hier gezeigte Methode erlaubt aber eine wesentlich genauere Ermittlung, und ist meiner Meinung nach auch schneller.
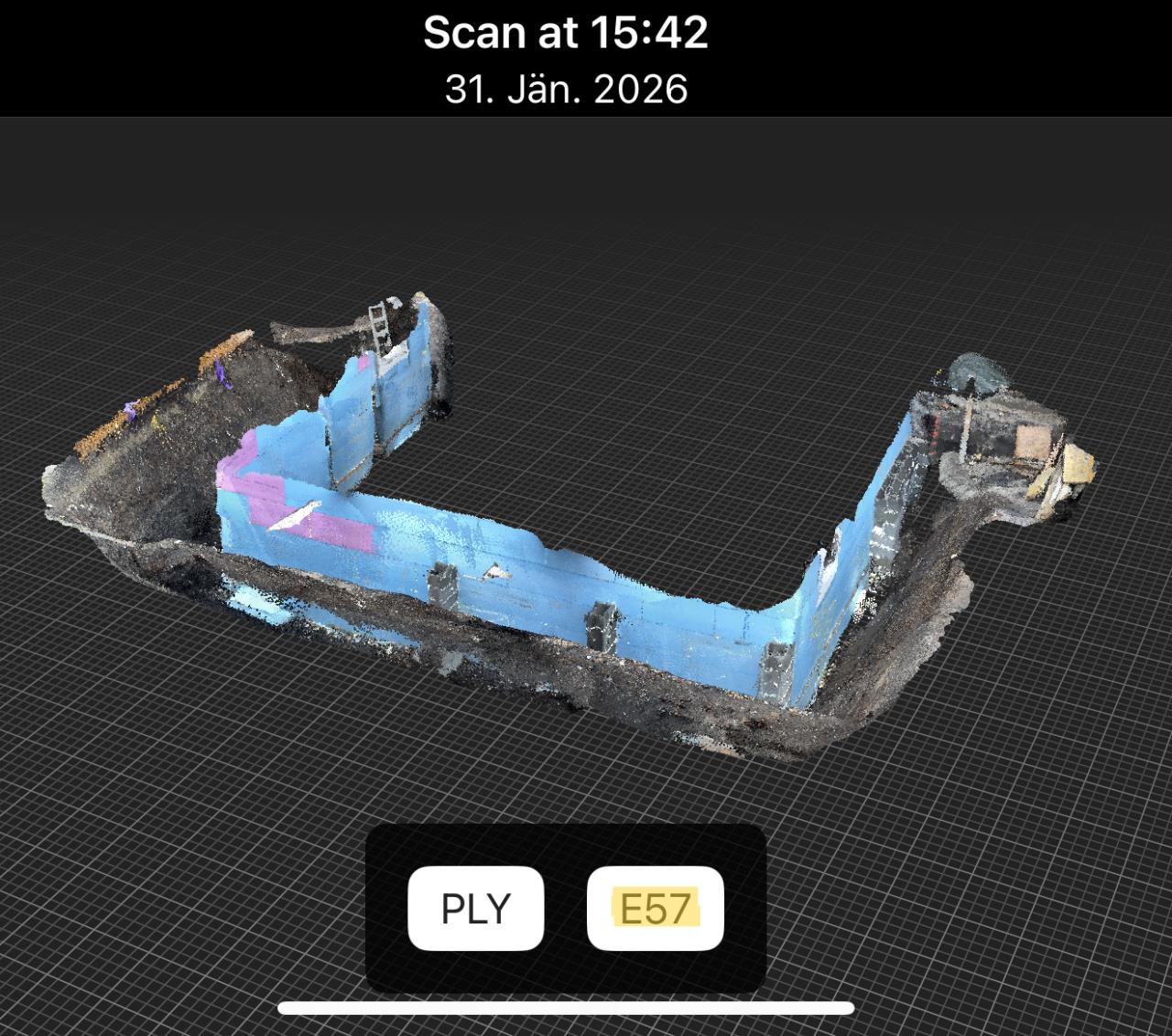
1. Teil- Lidar Scan anfertigen ~ 3 Minuten klingt kompliziert, ist aber einfach. Viele modere Smartphones haben (zwecks Bokeh Effekt für Fotos) ein Lidar verbaut. Bei dem von mir
verwendeten iPhone 13 Pro hat das Lidar eine Genauigkeit von etwa +/-3 cm. Der Maßstab im Scan stimmt bereits und ist in Meter.
Die App die ich verwendet habe heißt "
SiteScape"
https://www.sitescape.ai/ - diese ist kostenlos für die Zwecke wo ich sie einsetze.
Dabei gehe ich ohne das iPhone stark zu beschleunigen oder zu erschüttern einmal um den Arbeitsgraben. Langsam zu bewegen ist wesentlich, da die App den Beschleunigungssensor zweimal aufintegriert um die Translation im Raum richtig zu ermitteln.
Mehrmals an der gleichen Stelle vorbeizulaufen ist eher kontraproduktiv.
 2. Teil - Auswertung ~10 Minuten
2. Teil - Auswertung ~10 Minuten Ich exportiere im format .e57 auf den PC. (für den Transfer zwischen PC und iOS kann ich "localSend" nur sehr empfehlen!
https://localsend.org/de). Die Scans haben schnell mal mehrere 100 MBytes)
für die Auswertung nutze ich CloudCompare
https://www.cloudcompare.org/ - Opensource und kostenlos, aber dafür recht verwirrend in der Bedienung.
Wichtig! Es gibt kein "Undo" in dieser Software - also immer wieder Zwischenspeichern falls ein Schritt mal in die Hose geht. Eingaben auch mit "xx.yy" Punkt und nicht mit Komma "," durchführen.
1. Schritt - Ausrichtung des Scans am Koordinatensystem 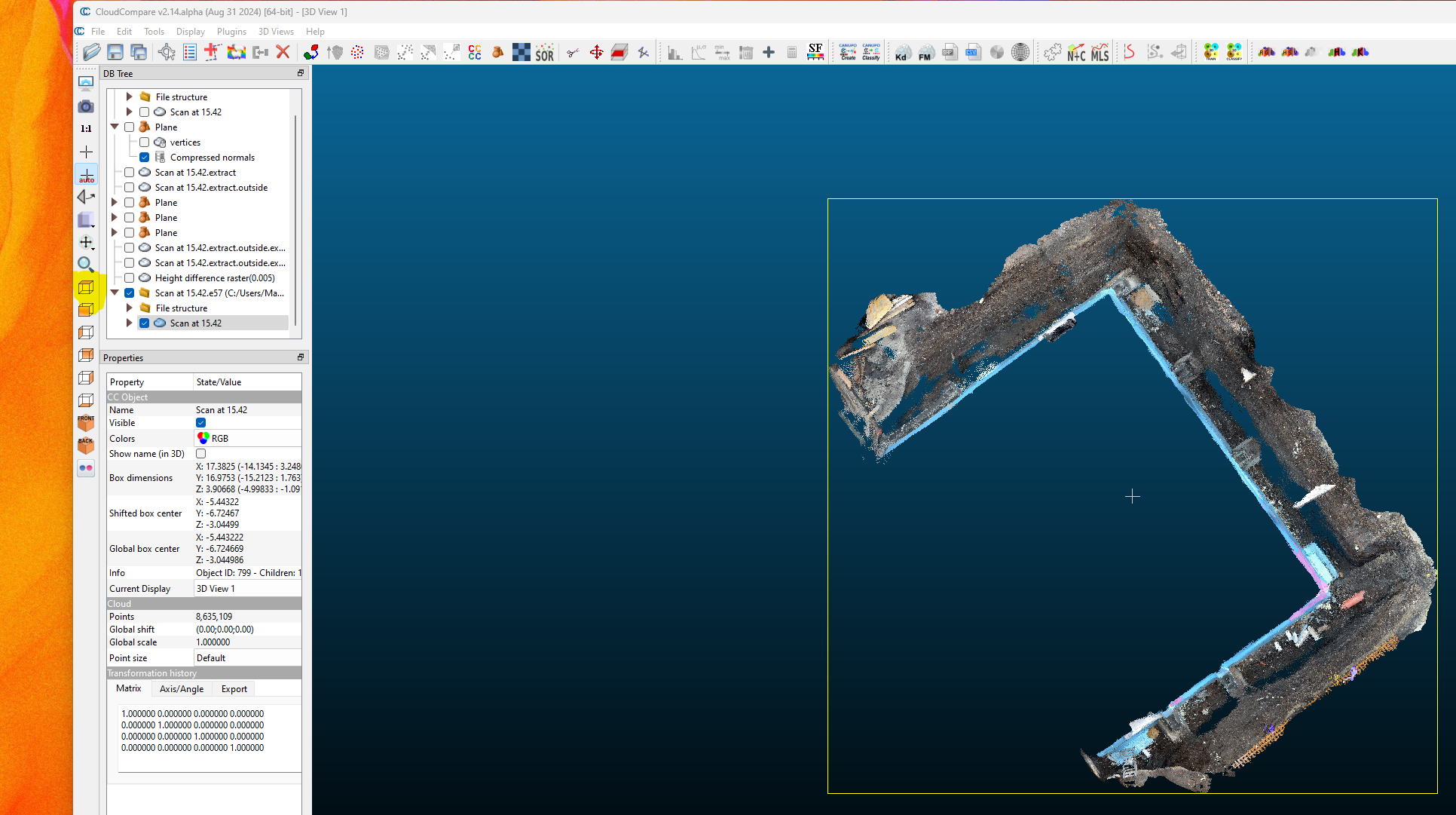
Sitescape bekommt bei mir die Senkrechte immer perfekt hin, aber die Drehung entlang der Z-Achse kann nach dem Import zum Koordinaten System nicht stimmen (woher soll es das auch wissen...).
Daher wähle ich Draufsicht.
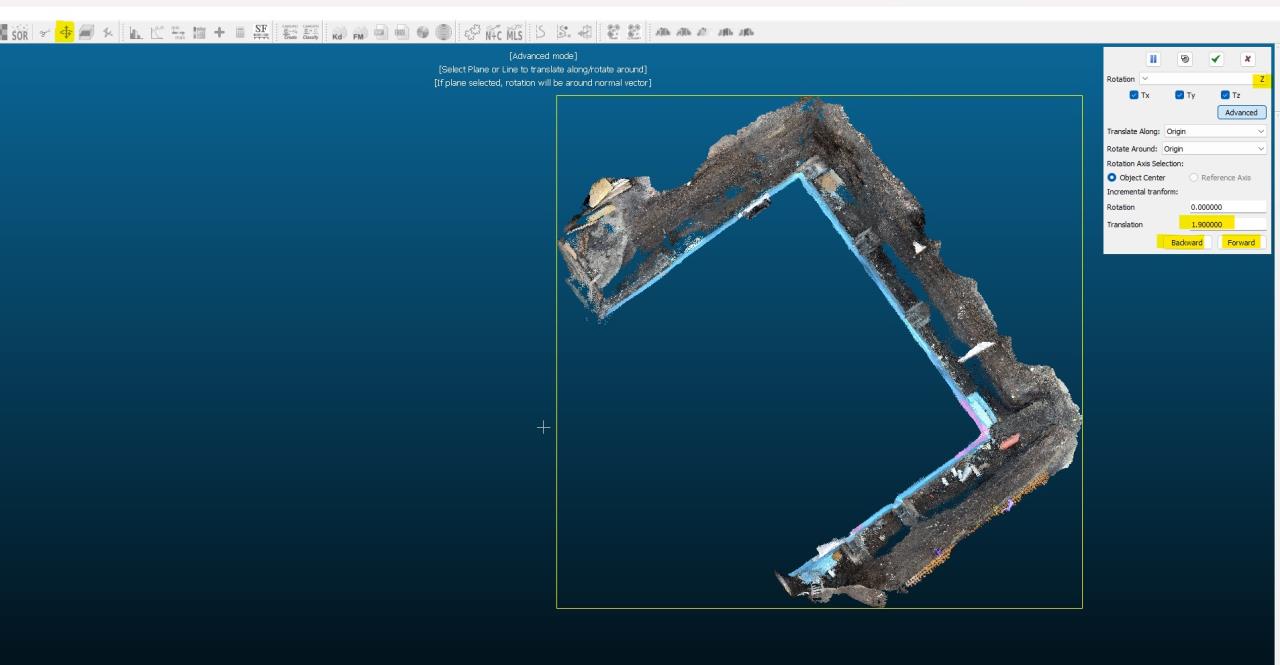
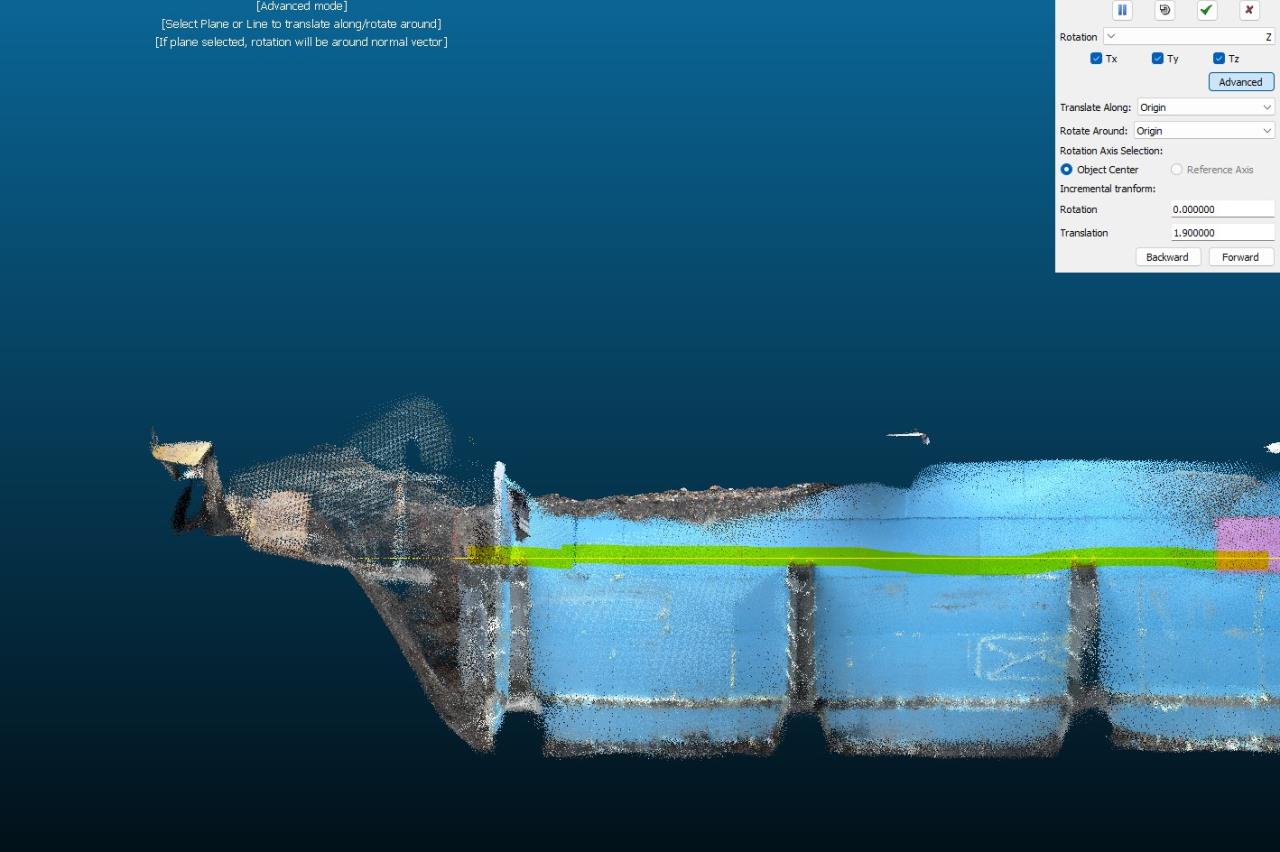
Mit dem "Translate & Rotate" Werkzeug lässt sich die Punktewolke drehen und verschieben. Für Rotation die Z-Achse auswählen.
Später verschiebe ich auch die Schnittebenen mit dem gleichen Werkzeug an die gewünschte Position.
Mit rechter Maustaste: Translation
Mit linker Maustaste: Rotation
Forward/Backward Knöpfe verschieben definierte Werte
2. Schritt: Ebene zeichnen zum Unterteilen ...bis wohin das Volumen nach Oben beschränkt werden soll
in meinem Fall soll der Arbeitsgraben nur bis zu den bereits gemauerten Fundamentsäulen (für Terasse, Eingangspodest, Nebengebäude) aufgefüllt werden. Daher werde ich die Ebene auf die Oberkante dieser legen.
Über Edit -> Plane -> Create, Winkel eingeben erzeugt dann die Ebene:
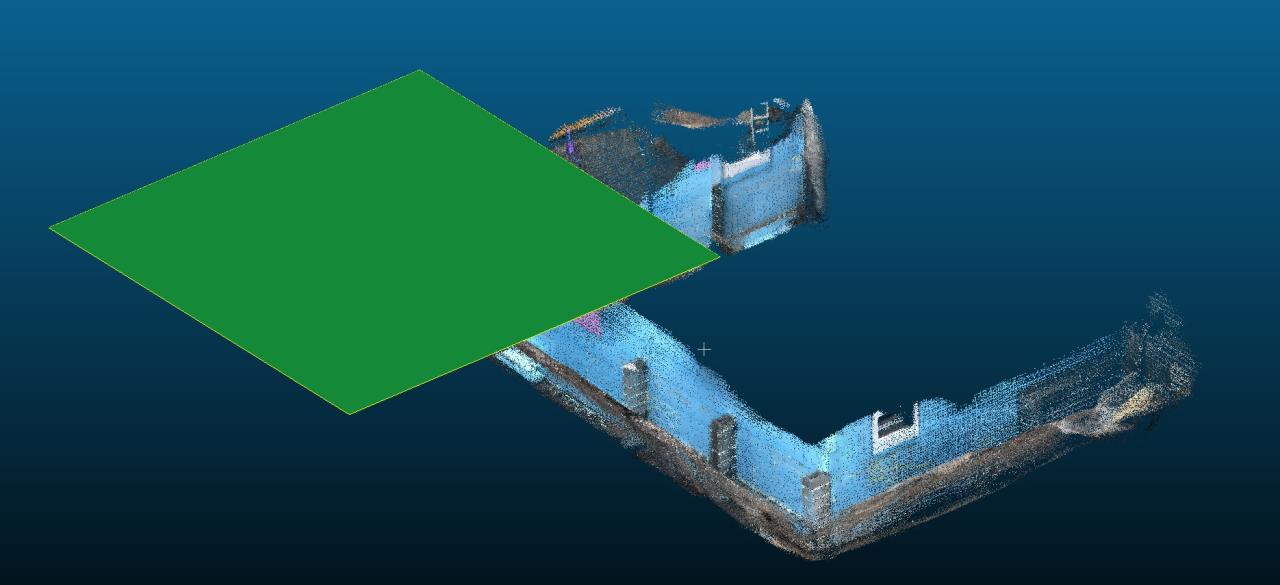
wieder mit dem Translate tool (wie Schritt 1) auf die Richtige position schieben.
 3. Schritt: Punktewolke "zerteilen" bei Ebene
3. Schritt: Punktewolke "zerteilen" bei Ebene diesmal Punktewolke + Ebene gleichzeitg anwählen und aif Tools -> Distances -> Cloud/Primitive Dist. gehen.
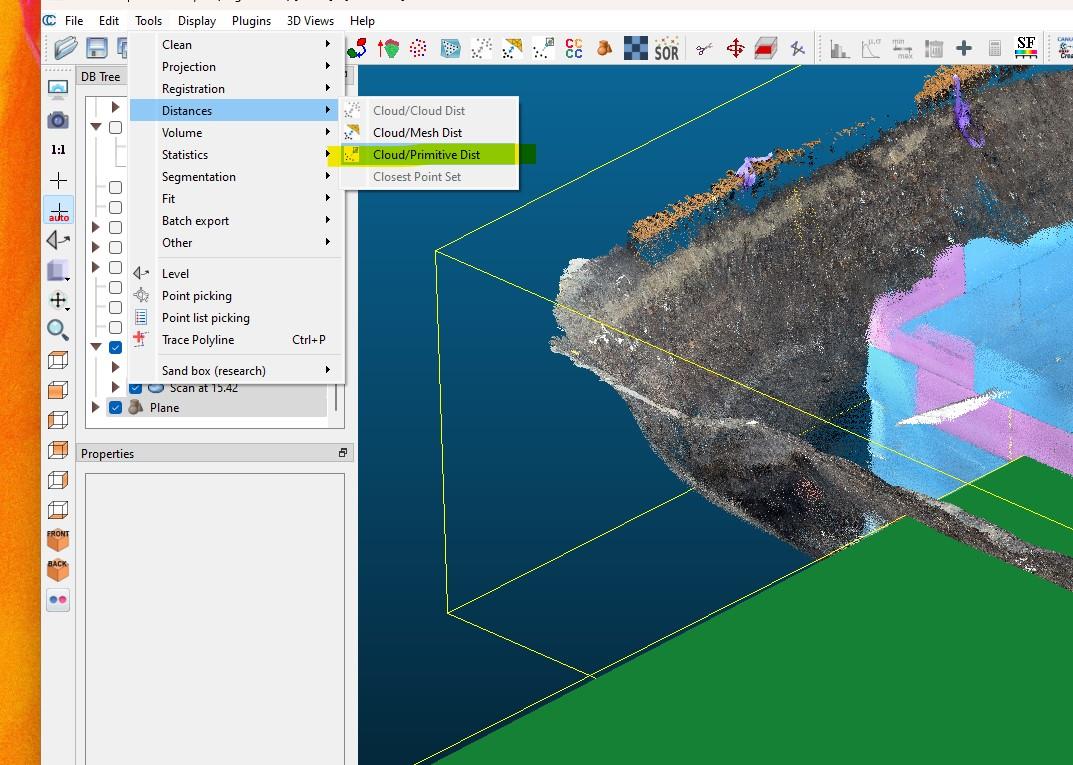
Im Dialogfeld "signed distances" ausgewählt lassen und weiter
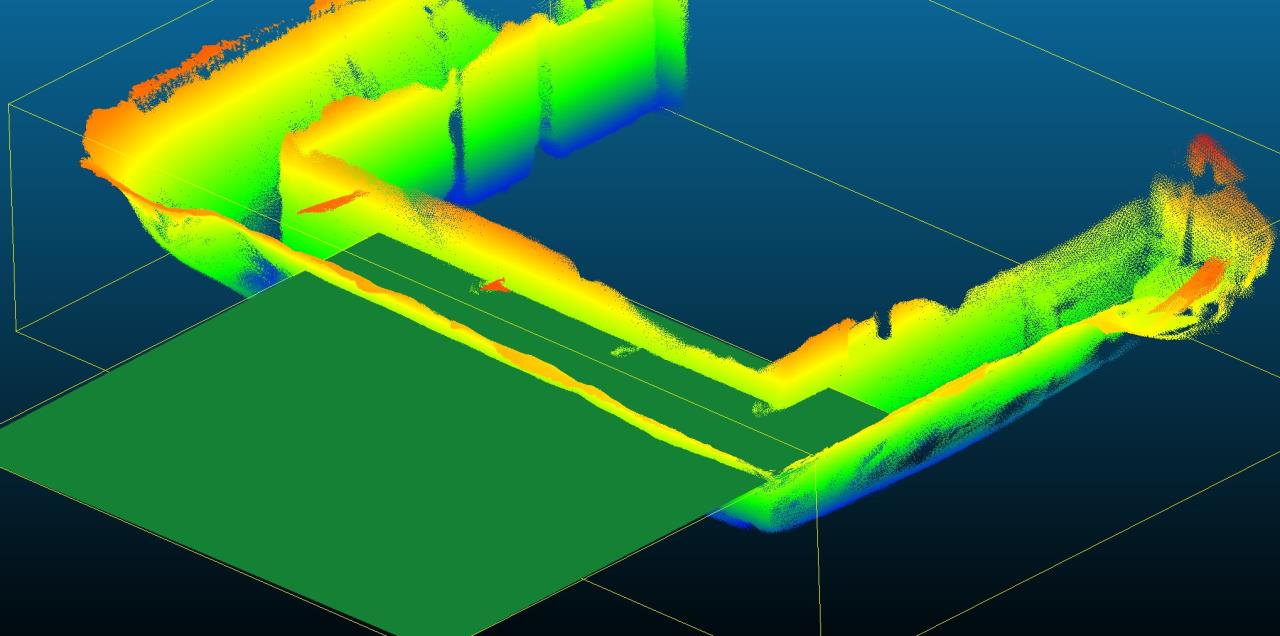
damit sollte das Ganze so aussehen.
Dann nur die Punktewolke anwählen und Edit -> Scalar fields -> Filter by value anwählen.
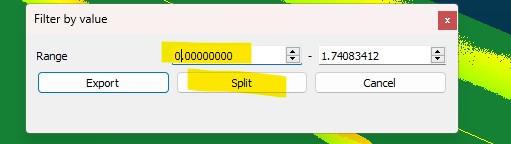
Bei Range "0" eingeben und mit "Split" die Punktewolke teilen
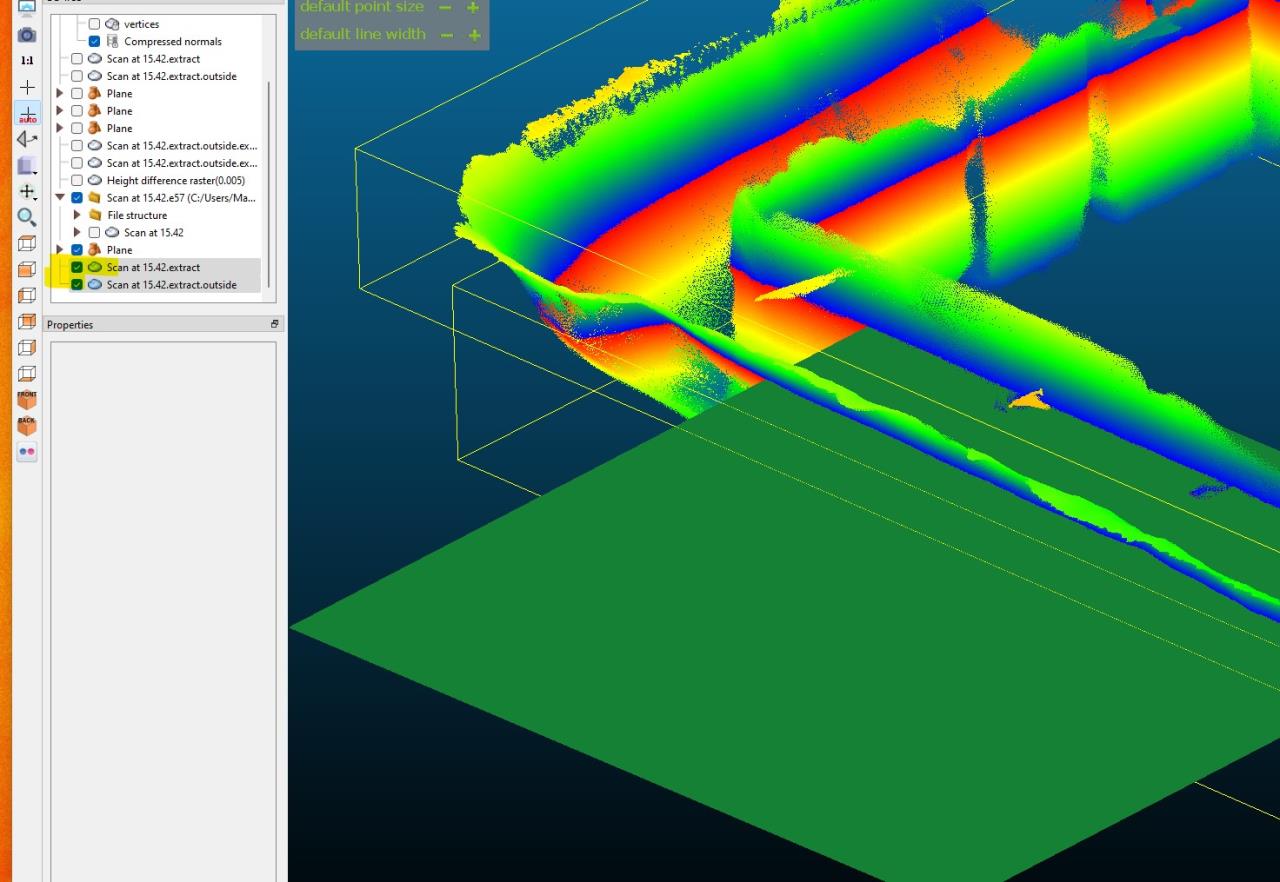
Es entstehen nun zwei Punktewolken. Die obere blende ich in meinem Fall mit dem Haken aus, da sie mich nicht mehr weiter interessiert.
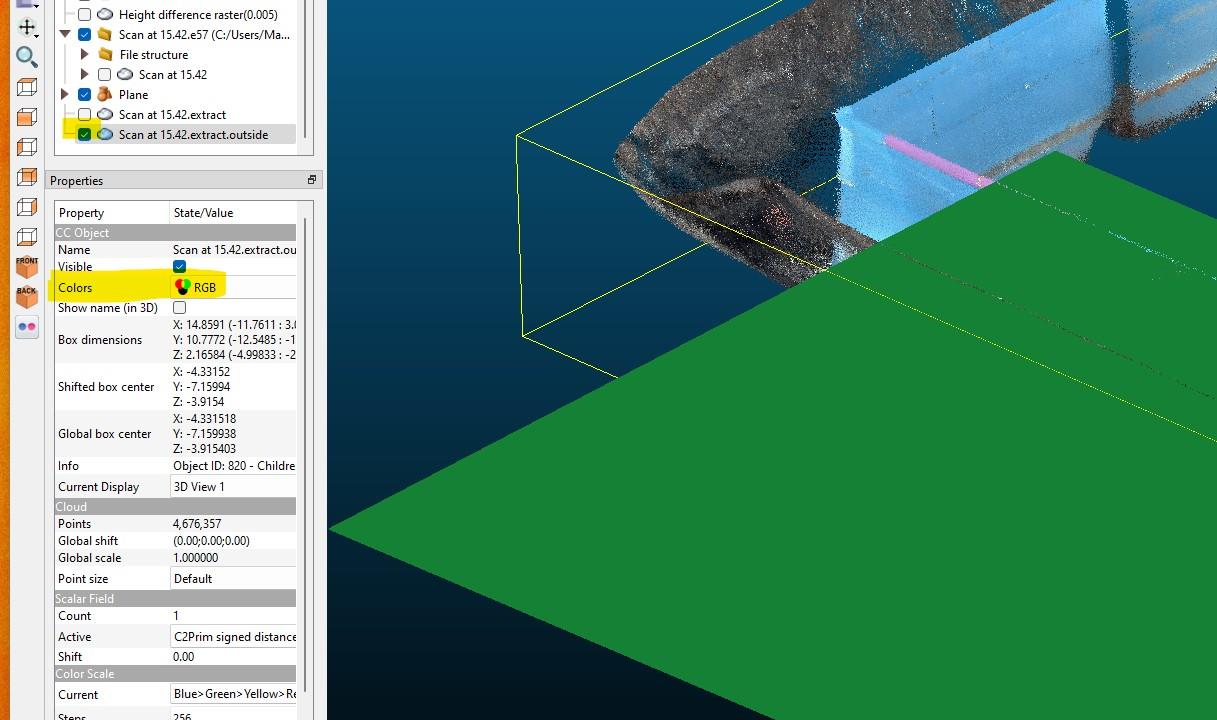
Ich stelle zwecks übersichtlichkeit die Darstellung der Punktewolke wieder auf RGB um.
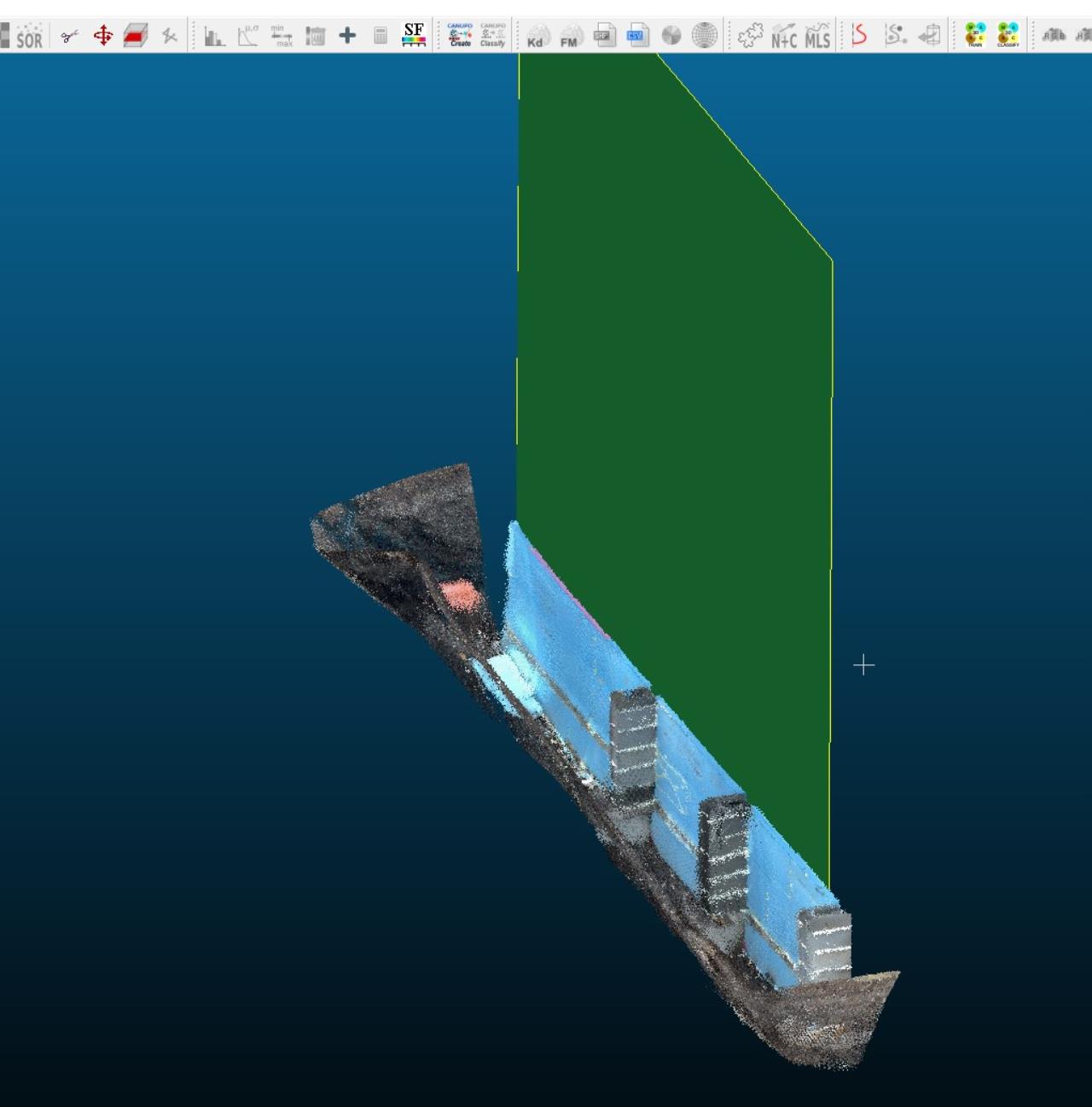
4. Schritt (optional): Scan weiter segmentieren In meinem Fall Teile ich den Arbeitsgraben in 3 Teile, von welchen ich separat das Volumen ermittle. Das mache ich deshalb, weil das Haus in der Mitte die Volumensberechnung bei der 2.5D Interpolation etwas stört und damit das Ergbnis verfälschen würde.
Gleiches Prozedere wie die Schritte 2+3, hier mit einer vertikalen Ebene:
 5. Schritt: 2.5D Volumen ermitteln
5. Schritt: 2.5D Volumen ermitteln Wieso nur 2.5D? Weil wir von einer Referenzebene auf unsere verbleibende Punktewolke das Volumen projizieren. Hinterschnitte sind damit nicht möglich und würden ein weiteres segmentieren der Punktewolke erfordern.
Für Schüttvolumen ist 2.5D meist ausreichend. Cloudcompare interpoliert ein Mesh zwischen den Punkten und errechnet anhand eines Rasters dann das Volumen.
Zuerst muss hierfür die Koordinate der Schnittebene notiert werden:
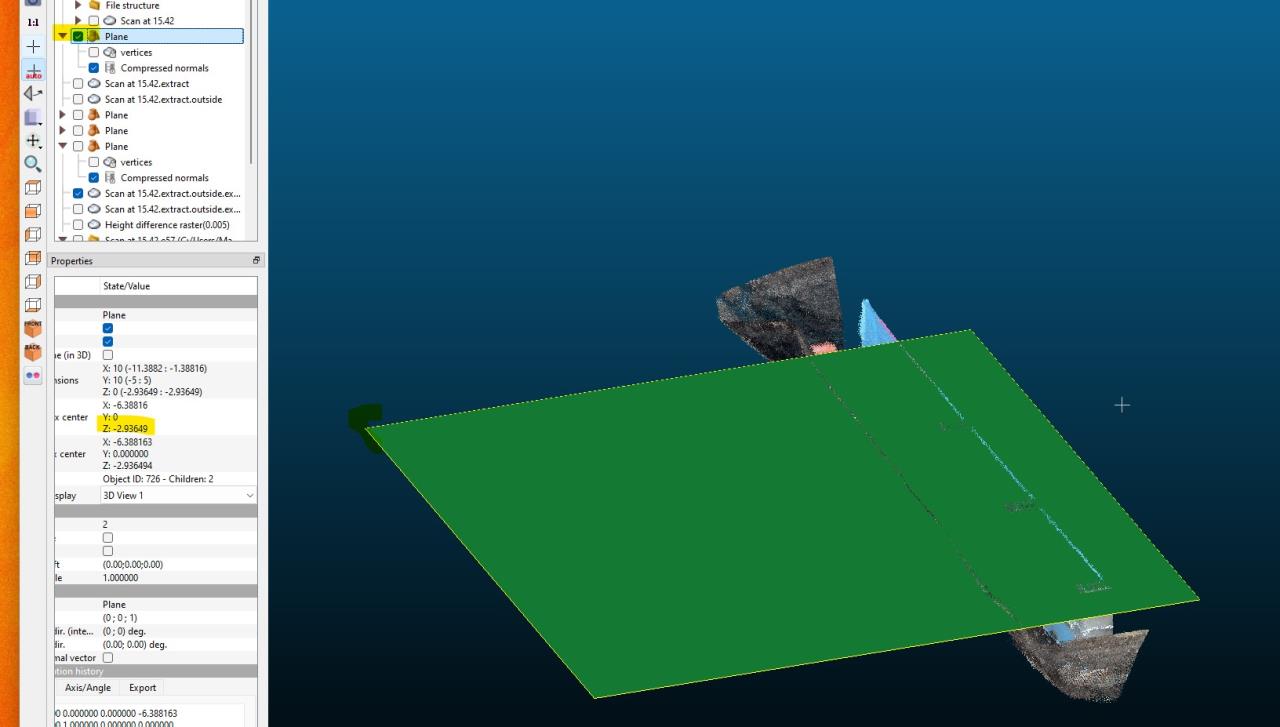
In meinem Fall Z: -2.94
Dann wähle ich nur mehr die Punktewolke an, von der ich das Volumen berechnen möchte:
Tools -> Volume -> Compute 2.5D Volume
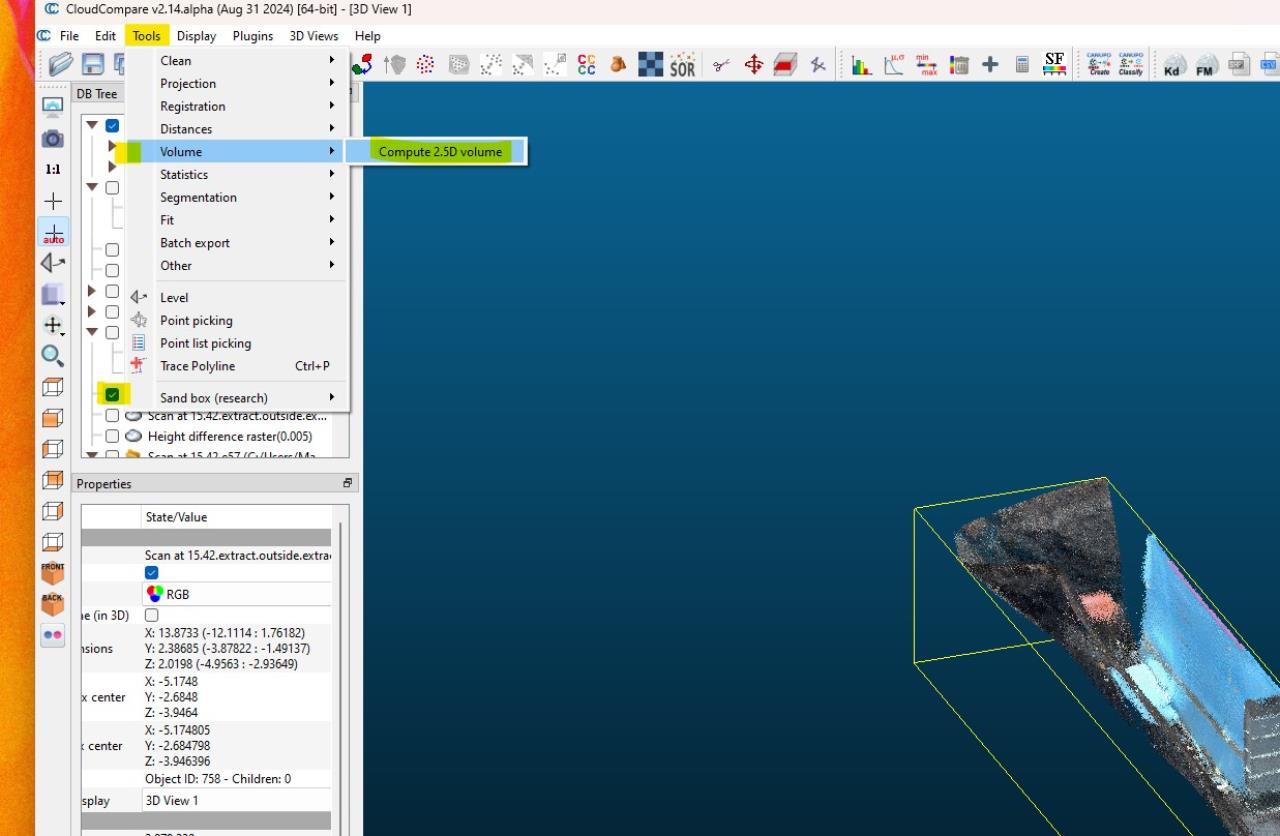
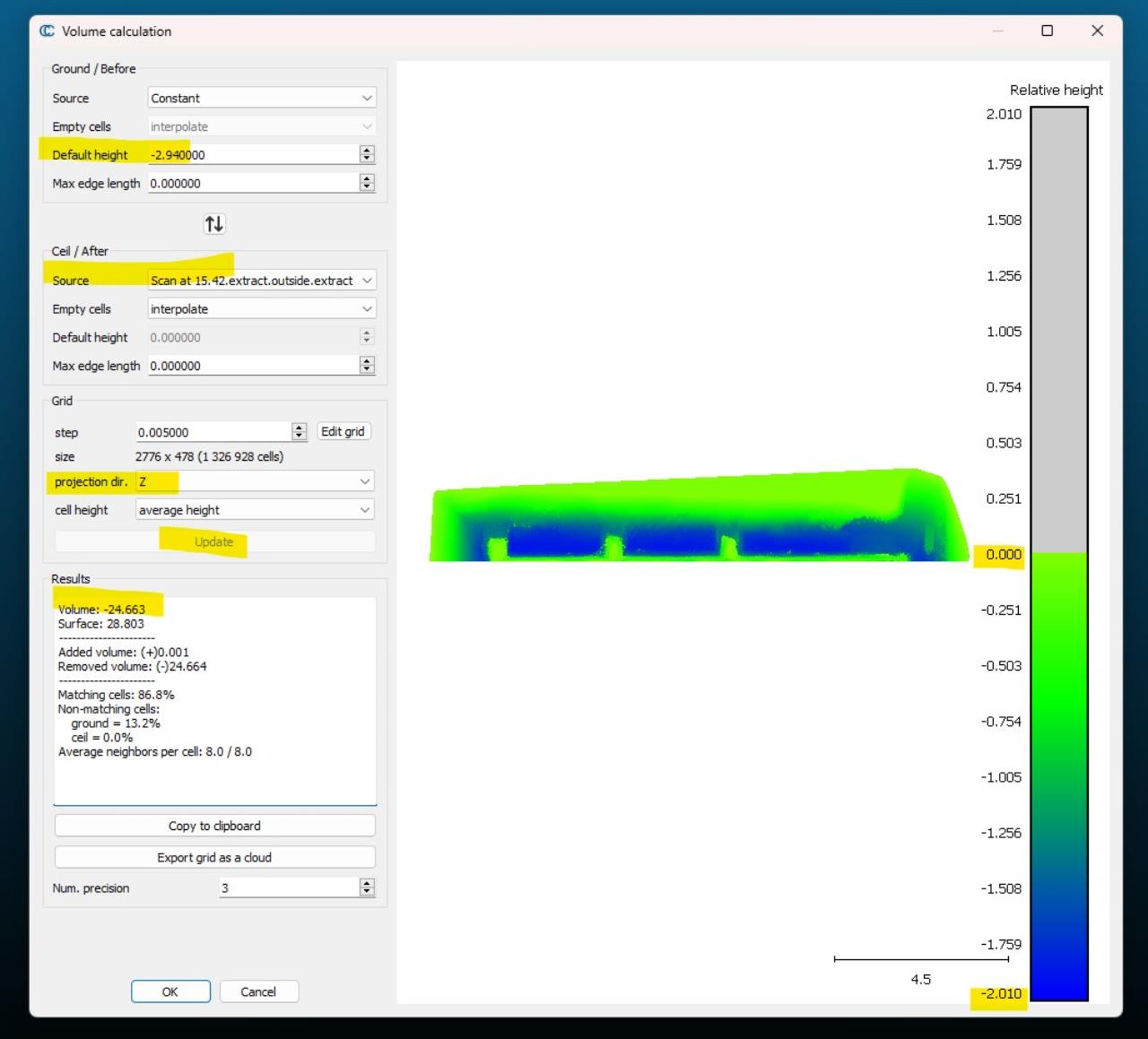
In dem Dialogfenster wird bei default height die position der Ebene eingegeben (Vorzeichen beachten!) die Source sollte bereits die zuvor ausgewählte Punktewolke stehen. Bei Projection Dir die richtige Achse auswählen (in meinem Fall Z) -> dann Update klicken. Das Raster ist in meinem Fall auf 5mm eingestellt. Je nach Dichte der Punktewolke kann hier auch gröber eingestellt werden. Bei Results steht dann das Volumen. Über die Heatmap sollte ein Sanity-Check durchgeführt werden. Die Skala sollte bei 0 beginnen.
In meinem Fall hat mein Arbeitsgraben(Teilabschnitt) nun ein
Volumen von 24,6m³.
Der gesamte verbleibende Arbeitsgraben hat bei mir somit für die erste Verfüllung 52m³.
Mit dem Button "Export grid as a cloud" kann nochmal 3D überprüft werden ob das Ganze richtig aussieht:
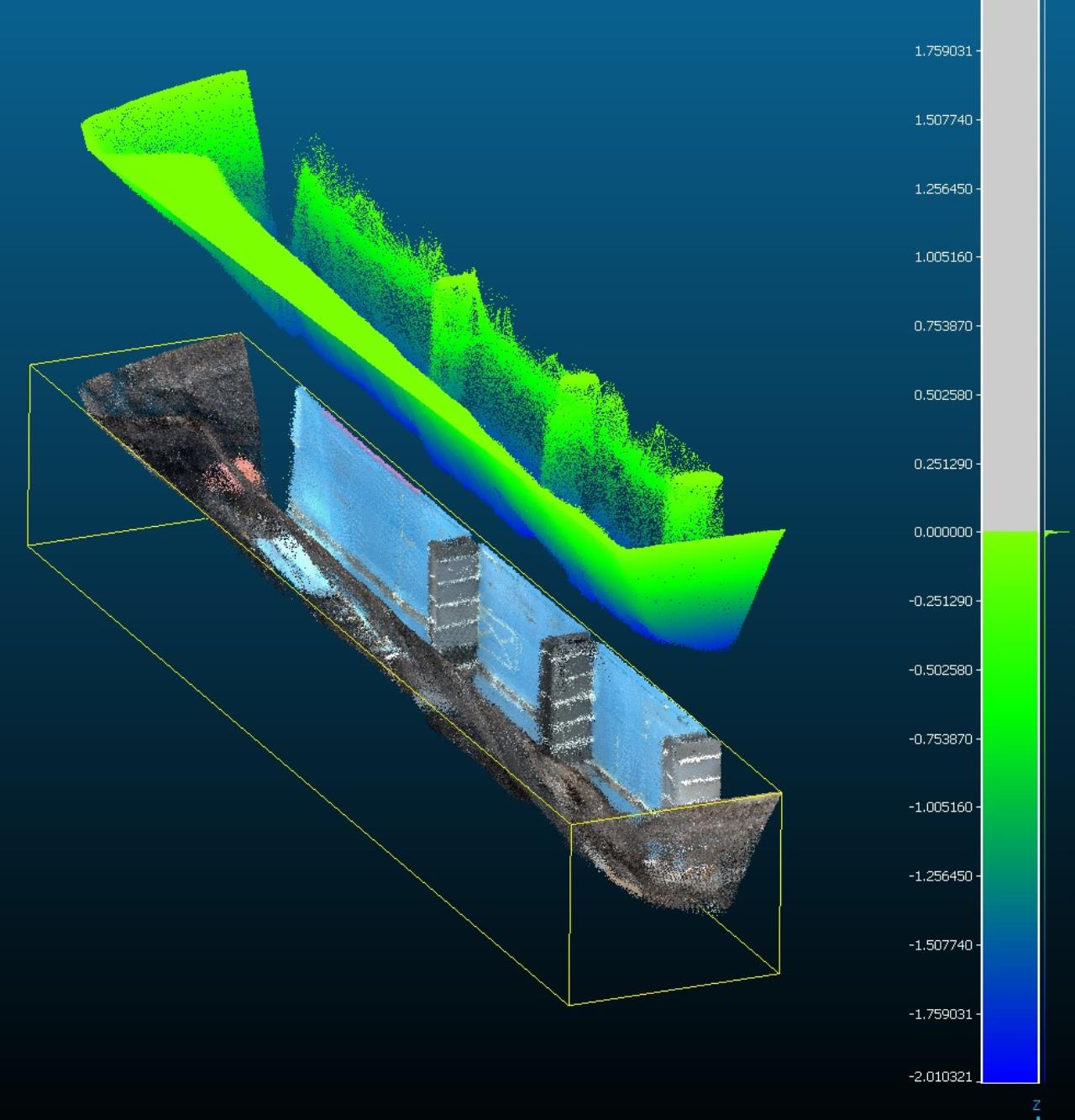
Das war es auch schon
😉 Eigentlich nur 3 Operationen in CloudCompare die sitzen müssen - dann geht es flott von der Hand.
Ich hoffe euch damit bei dem einen oder anderen Problem geholfen zu haben - für mich ist es hier nun eine Gedankenstütze.
Bitte um Feedback mit welchen Geräten ihr eure Scans durchgeführt habt, und ebenfalls zuverlässig funktionieren.
